Loading...
Searching...
No Matches
control_input_bounds_shooting.hpp File Reference
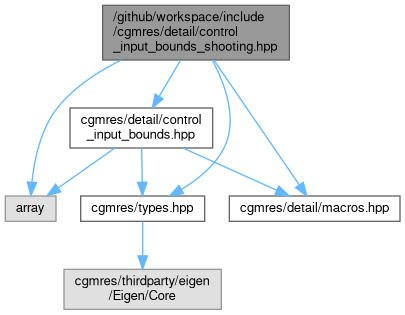
#include <array>#include "cgmres/types.hpp"#include "cgmres/detail/macros.hpp"#include "cgmres/detail/control_input_bounds.hpp"
Include dependency graph for control_input_bounds_shooting.hpp:
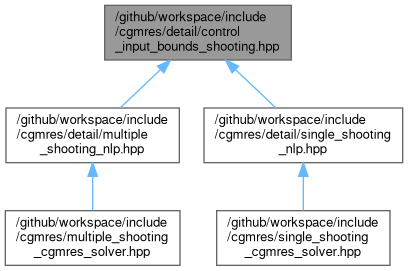
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| namespace | cgmres |
| namespace | cgmres::detail |
| namespace | cgmres::detail::ubounds |
Functions | |
| template<typename OCP , int N> | |
| void | cgmres::detail::ubounds::eval_fonc_hu (const OCP &ocp, const Vector< OCP::nuc *N > &solution, const std::array< Vector< OCP::nub >, N > &dummy, const std::array< Vector< OCP::nub >, N > &mu, Vector< OCP::nuc *N > &fonc_hu) |
| template<typename OCP , int N> | |
| void | cgmres::detail::ubounds::eval_fonc_hdummy (const OCP &ocp, const Vector< OCP::nuc *N > &solution, const std::array< Vector< OCP::nub >, N > &dummy, const std::array< Vector< OCP::nub >, N > &mu, std::array< Vector< OCP::nub >, N > &fonc_hdummy) |
| template<typename OCP , int N> | |
| void | cgmres::detail::ubounds::eval_fonc_hmu (const OCP &ocp, const Vector< OCP::nuc *N > &solution, const std::array< Vector< OCP::nub >, N > &dummy, const std::array< Vector< OCP::nub >, N > &mu, std::array< Vector< OCP::nub >, N > &fonc_hmu) |
| template<typename OCP , int N> | |
| void | cgmres::detail::ubounds::multiply_hdummy_inv (const std::array< Vector< OCP::nub >, N > &dummy, const std::array< Vector< OCP::nub >, N > &mu, const std::array< Vector< OCP::nub >, N > &fonc_hdummy, const std::array< Vector< OCP::nub >, N > &fonc_hmu, std::array< Vector< OCP::nub >, N > &fonc_hdummy_inv) |
| template<typename OCP , int N> | |
| void | cgmres::detail::ubounds::multiply_hmu_inv (const std::array< Vector< OCP::nub >, N > &dummy, const std::array< Vector< OCP::nub >, N > &mu, const std::array< Vector< OCP::nub >, N > &fonc_hdummy, const std::array< Vector< OCP::nub >, N > &fonc_hmu, const std::array< Vector< OCP::nub >, N > &fonc_hdummy_inv, std::array< Vector< OCP::nub >, N > &fonc_hmu_inv) |
| template<typename OCP , int N> | |
| void | cgmres::detail::ubounds::retrive_dummy_update (const OCP &ocp, const Vector< OCP::nuc *N > &solution, const std::array< Vector< OCP::nub >, N > &dummy, const std::array< Vector< OCP::nub >, N > &mu, const Vector< OCP::nuc *N > &solution_update, std::array< Vector< OCP::nub >, N > &dummy_update) |
| template<typename OCP , int N> | |
| void | cgmres::detail::ubounds::retrive_mu_update (const OCP &ocp, const Vector< OCP::nuc *N > &solution, const std::array< Vector< OCP::nub >, N > &dummy, const std::array< Vector< OCP::nub >, N > &mu, const Vector< OCP::nuc *N > &solution_update, std::array< Vector< OCP::nub >, N > &mu_update) |
| template<typename OCP , int N> | |
| void | cgmres::detail::ubounds::clip_dummy (std::array< Vector< OCP::nub >, N > &dummy, const Scalar min) |